


为了消除潜在的驾驶安全隐患,国内外都大力发展无人驾驶车辆技能,先进的驾驶辅佐体系是保障未来路途和驾乘安全的驱动力。随着研制速度与技能更迭速度的不断加速,轿车辅佐驾驶体系也在朝着复杂化和多元化的方向发展,传统的测验手法现已无法快速且有用的对搭载智能驾驶技能的车辆进行测验,而且测验实现本钱大,安全性和周期性也无法保证,因此半实物仿真测验技能成为智能车的不可或缺的研究手法,而汽车雷达目标模拟器是其中的重要仪器设备。

系统优势:
快速硬件在环测验系统的仿真和测验才能;
具备生成修改制作方针运动轨迹,存储场景功能;
运用VRTS来模仿从行人穿越大街到变道驾驶等不同的场景,能够轻松习惯快速演进的监管环境;
根据灵敏的软件和模块化硬件平台,能够构建更智能且高度定制的测验系统,以验证汽车雷达传感器的性能;
直观清晰的用户交互界面更简略的选择方针场景和配置自动化测验序列。
应用需求:
雷达功能测验——针对雷达前期的方针模拟和测验验证是非常重要的环节,为了节省雷达研制周期、外场测验的时间、资源和人力本钱,需求在实验室环境下为雷达供给方针的模拟,以及在雷达生产阶段,供给雷达产品的最终指标检测。
场景生成-为了测验仿真成果与真是道路测验成果接近,体系要根据实践测验场景来快速构建测验场景,以应对不同复杂程度下的场景测验。
体系灵活性-能够针对不同场景不同车型对仿真场景做出修正,而且仿真软件应具备开放的第三方接口能够将其他软件构建的更为精确的车辆模型加入到仿真测验环境中。
解决方案:
(1)雷达测试系统提供可配置的自动化测试序列,可以轻松完成雷达传感器的射频指标测量,验证汽车雷达传感器的性能。
(2)雷达测试仿真系统平台提供底层驱动完成目标模拟,可仿真常见的驾驶场景如星型模式、道路切换、穿越道路等场景。
(3)雷达测试仿真系统平台封装的底层驱动完成运动轨迹解算,用户根据测试案例需要,绘制目标运动轨迹,场景生成也允许用户编辑、保存多个场景,确保测试序列可控和可以无差别重复进行。
(4)雷达测试仿真系统平台也提供第三方的场景仿真软件比如prescan、carmaker的接口,可完成AEB、 ACC、LKA等复杂场景的测试。
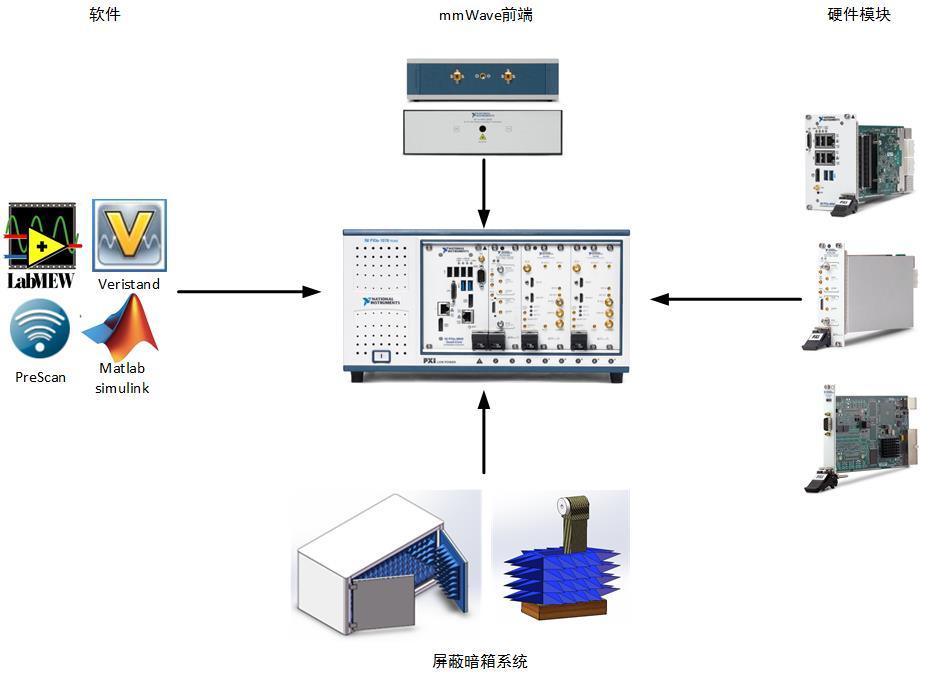
系统构架:
关键特性/指标:
频率范围 | 76-81GHz |
最大瞬时带宽 | 1GHz |
| 最小障碍物范围 | 4m |
| 目标个数 | 1~4个(每个PXI机箱) |
| VRTS与DUT的距离(L1) | 0.7m,最小值 |
| 目标模拟距离(L2) | 2.5m(典型值),3m(最大值)@最短目标模拟距离>300m@最大目标模拟距离 |
| 距离分辨率 | 10cm(3m<L2<95m) 12cm(L2>95m) |
| 距离精度 | ±15cm |
| 多普勒范围 | 0~±500km/h (75kHz) |
| 多普勒分辨率 | 0.1km/h(15Hz) |
| 多普勒精度 | ±0.05km/h (7.5Hz) |
| RCS | 105dB(-20dBsm~85dBsm),典型值 |
| 场景生成 | 实验室环境完成星型模式、道路切换、穿越道路等驾驶场景模拟 |
| 雷达性能测试 | 天线方向图,EIRP,相位噪声,频谱占用,hirp分析,波束宽度 |
| 目标模拟编辑 | 配置目标距离,速度,RCS等 |
| 复杂场景测试 | AEB,ACC,LKA等 |